
Architecture
RDK Broadband follows a layered architecture that cleanly separates application logic from hardware-specific implementation through well-defined interfaces. The architecture is organized into multiple layers, including Application, Middleware, and Hardware Abstraction Layer, enabling clear separation of responsibilities and reducing cross-layer dependencies. This modular structure allows RDK Broadband to remain WAN-agnostic by supporting multiple access technologies such as DOCSIS, DSL, GPON, and LTE through standardized managers and HAL interfaces, while allowing the same core middleware stack to operate consistently across different hardware platforms.
The RDK Broadband middleware is designed as a collection of largely independent, componentized services, each responsible for a specific functional domain such as Wi-Fi, WAN, or Voice. These components communicate through defined interfaces and data models, minimizing tight coupling and enabling selective inclusion based on target device requirements. As a result, middleware components can be added, removed, or replaced without impacting unrelated functionality, making it straightforward to tailor builds for devices with different capabilities or feature sets. This design approach improves portability, simplifies customization, and supports long-term extensibility without requiring changes to the overall architecture.
Device Layers
RDK Broadband organizes components based on functionality and level of abstraction, with each group having clearly defined responsibilities. Within the middleware layer, components are largely independent and communicate with each other using IPC mechanisms, enabling modularity and selective inclusion based on device requirements. Hardware access is performed through HAL interfaces, with platform-specific implementations translating these interactions to the underlying system.
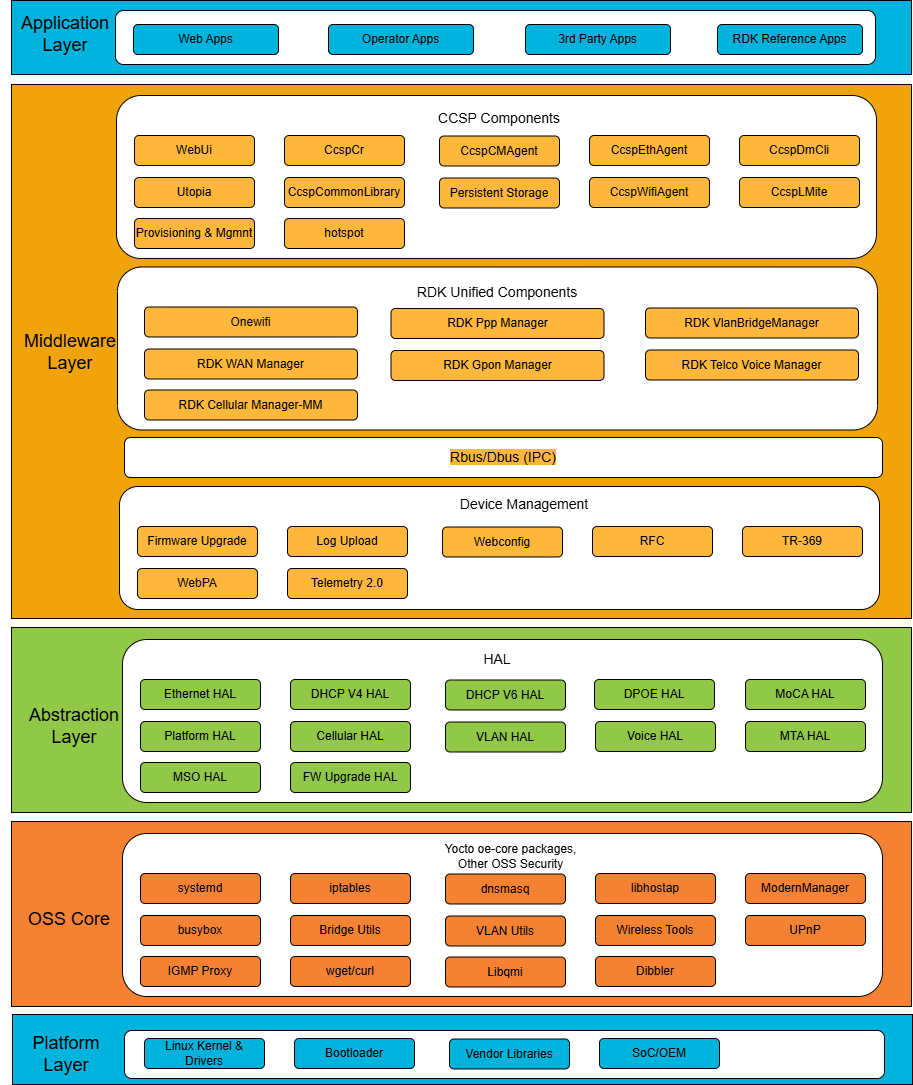
Application Layer
The Application Layer serves as the primary interface through which CPE consumers interact with the device, including support for third-party applications. This layer hosts web-based applications that provide browser-accessible interfaces for device configuration and monitoring, including local web UI capabilities for customer self-service with responsive designs for desktop and mobile access. It also supports operator-specific applications for network management, diagnostics, and CPE provisioning, as well as third-party applications that extend device functionality with capabilities such as parental controls, security services, and smart home integration. .
Middleware Layer
The RDK Broadband Middleware can be logically organized into multiple subsections based on functionality and architectural role.
- CCSP Components: Legacy framework components that provide foundational services, maintain backward compatibility with existing deployments, and implement the TR-181 data model to ensure interoperability with legacy systems.
- RDK Unified Components: Next-generation components designed to improve performance and reduce architectural complexity, with native RBUS support. These components represent the ongoing evolution of the RDK Broadband architecture and are progressively replacing CCSP components.
- RBUS/D-Bus IPC: The inter-component communication backbone for the middleware. RBUS serves as the modern, high-performance message bus and is the preferred choice for new components, while D-Bus is retained to support legacy CCSP-based implementations.
- Device Management: Protocol agents and device services that enable remote device management and lifecycle operations.
- TR-369 (USP): Next-generation management protocol supporting MQTT, WebSocket, and STOMP bindings with improved security and flexibility
- WebPA: HTTP/WebSocket-based protocol for real-time device management and configuration
- Webconfig: Centralized configuration management allowing bulk device provisioning and policy enforcement
- RFC (Remote Feature Control): Dynamic feature enablement and A/B testing framework for controlled rollouts
- Telemetry 2.0: Telemetry collection with configurable profiles, event-driven reporting, and data aggregation
- Firmware Upgrade: Secure firmware download, verification, installation, and rollback capabilities
- Log Upload: Automated collection and upload of device logs for troubleshooting and diagnostics
Hardware Abstraction Layer (HAL)
The HAL provides standardized, vendor-neutral interfaces that enable middleware portability across different chipsets, allowing the same middleware codebase to run on multiple hardware platforms and simplifying the ability to switch hardware vendors. By isolating hardware-specific details behind well-defined HAL interfaces—such as Wi-Fi, Ethernet, DHCP V4/V6, Platform, Cellular, and VLAN—the architecture promotes flexibility and vendor competition. Hardware-dependent capabilities, including MAP-T support, 6 GHz operation, multicast handling, and secure boot, are determined by the underlying chipset and vendor-specific implementations.
OSS Core Layer
Built on the Yocto/OpenEmbedded Linux ecosystem, the OSS Core Layer provides foundational open-source packages that RDK Broadband middleware utilizes. This layer includes system management tools (systemd, dbus, busybox), networking components (iptables, dnsmasq, Bridge Utils, VLAN Utils, Wireless Tools), and application services (libhostap, ModemManager, UPnP, IGMP Proxy, wget/curl, Libqmi, Dibbler). These components provide the underlying OS-level functionality that RDK Connectivity middleware builds upon.
Platform Layer
The Platform Layer represents the hardware foundation providing kernel, drivers, bootloader, and vendor-specific implementations. The Linux kernel includes network device drivers for Wi-Fi, Ethernet, and cellular modems, USB drivers for peripheral connectivity, flash storage drivers (MTD, UBI) for firmware and configuration storage, and hardware cryptographic accelerators for encryption offload. Bootloaders use U-Boot or vendor-specific implementations that handle hardware initialization, load kernel and device tree, and perform secure boot verification through cryptographic signature checking. Vendor libraries include SoC-specific implementations for hardware features, acceleration libraries for video codec and cryptographic operations, and Wi-Fi drivers (proprietary or open-source depending on vendor). SoC support spans multiple vendors including Broadcom, Qualcomm, Intel, and MediaTek with Board Support Packages and reference designs provided by manufacturers.
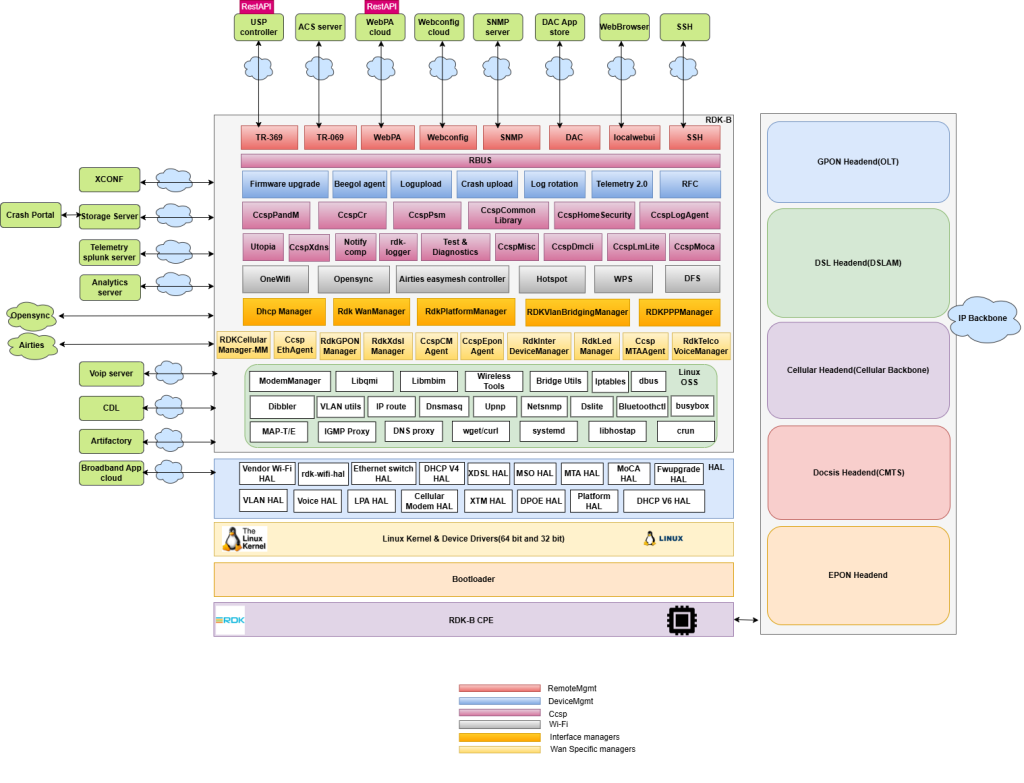
Architectural Deep dive
The following diagram provides a detailed view of the RDK Broadband architecture, showing all components and their relationships:
CCSP
CCSP (Common Component Software Platform) is a framework developed as part of the RDK Broadband initiative to provide a standardized, component-based approach to implementing broadband device functionality. The framework provides standardized component interfaces, reference implementations, common libraries and utilities, and unified message bus communication.
CCSP Architecture
Core Components
The CCSP framework relies on several foundational components that provide infrastructure services used by all other components. These core components handle component registration and discovery, parameter persistence, common library functions, and device-level management. Without these core services, functional components like Wi-Fi or WAN agents cannot operate.
CcspCr (Component Registry): Acts as the central registry where components announce their presence and capabilities at startup. CcspCr maintains a mapping of TR-181 namespaces to component names (e.g., Device.Wi-Fi.* → CcspWi-FiAgent), performs health monitoring through periodic heartbeat checks, provides discovery services allowing components to locate each other without hardcoded dependencies, and supports namespace conflict resolution when multiple components claim the same parameters.
CcspPandM (Provisioning and Management): Manages device-level operations including device provisioning (first boot configuration, factory reset handling), parameter management for Device.DeviceInfo.* (manufacturer, model, serial number), Device.Time.* (NTP configuration, timezone), and Device.UserInterface.* (web UI settings). CcspPandM acts as the TR-181 gateway receiving requests from TR-069 client or WebPA agent and routing them to appropriate components based on CcspCr lookups.
CcspPsm (Persistent Storage Manager): Provides database services using XML files or SQLite for parameter storage with in-memory cache for fast access. PSM handles parameter persistence ensuring configuration survives reboots, backup and restore operations for disaster recovery, and transaction support for atomic multi-parameter updates.
CcspCommonLibrary: Offers shared libraries that simplify IPC operations, providing wrapper functions that hide IPC complexity, data model framework with TR-181 type conversions, component infrastructure for registration and message handling, and utility functions for logging, memory management, and string operations.
Key Components
Key components implement specific functional domains, handling dedicated areas like Wi-Fi, Ethernet, cable modem, and network management.
CcspWi-FiAgent: Controls all Wi-Fi operations including radio management, SSID configuration, and client connectivity. It manages wireless radios across 2.4GHz, 5GHz, and 6GHz bands, supports multiple SSIDs per radio with independent security policies, and handles client association, authentication, and steering. Owns the Device.Wi-Fi.* namespace covering Device.Wi-Fi.Radio.{i}.* for radio configuration (channel, bandwidth, transmit power), Device.Wi-Fi.SSID.{i}.* for SSID management, and Device.Wi-Fi.AccessPoint.{i}.* for security settings and client statistics.
CcspEthAgent: Manages all Ethernet wired networking operations including physical port configuration, link state management, and statistics collection. It monitors interface status, tracks traffic metrics, and configures port-level parameters such as duplex mode and speed. Owns the Device.Ethernet.* namespace covering Device.Ethernet.Interface.{i}.* for interface parameters and Device.Ethernet.Link.{i}.* for link-level configuration.
CcspCMAgent: Interfaces with the cable modem hardware to monitor DOCSIS WAN connectivity and provide access to modem diagnostics. It tracks signal quality metrics, channel bonding status, and modem operational state, providing visibility into downstream/upstream channels and performing cable network diagnostics. Owns the Device.X_CISCO_COM_CableModem.* namespace for DOCSIS-specific parameters including signal levels (SNR, power), channel information, and modem status.
CcspLMLite: Discovers and tracks devices connected to the LAN through active monitoring of ARP tables and DHCP lease information. It maintains an inventory of connected hosts with their MAC addresses, IP addresses, hostnames, and connection timestamps, building a real-time network topology map. Owns the Device.Hosts.* namespace including Device.Hosts.Host.{i}.* for discovered device information and connection details.
CcspDmCli: Command-line tool for TR-181 operations enabling parameter get/set, table operations, component discovery, and debugging during development.
Message Flow Example
When changing a Wi-Fi channel through a protocol agent (TR-369, WebPA, etc.), the cloud server sends an HTTPS POST to the Protocol Agent with parameter name and value. Protocol Agent queries CcspCr to find the owner (CcspWi-FiAgent), then sends an IPC setParameterValues request. CcspWi-FiAgent validates the channel against regulatory rules and radio state, invokes the HAL API for platform operation in Wi-Fi HAL which translates to vendor commands, persists the value through PSM, publishes an IPC event, and returns success.
%%{init: { "config": { "useMaxWidth": false } }}%%
sequenceDiagram
participant Cloud
participant Agent as Protocol Agent
participant CcspCr
participant CcspWi-FiAgent
participant PSM
participant Wi-Fi_HAL
participant Hardware
Cloud->>Agent: HTTPS POST SetParameterValues<br/>Device.Wi-Fi.Radio.1.Channel=11
Agent->>CcspCr: Query component for<br/>Device.Wi-Fi.Radio.1.Channel
CcspCr-->>Agent: CcspWi-FiAgent
Agent->>CcspWi-FiAgent: IPC setParameterValues
CcspWi-FiAgent->>CcspWi-FiAgent: Validate channel, check regulatory
CcspWi-FiAgent->>Wi-Fi_HAL: HAL API for platform operation
Wi-Fi_HAL->>Hardware: Vendor-specific commands
Hardware-->>Wi-Fi_HAL: Success
Wi-Fi_HAL-->>CcspWi-FiAgent: Return 0
CcspWi-FiAgent->>PSM: Persist new value
PSM-->>CcspWi-FiAgent: Stored
CcspWi-FiAgent->>Agent: IPC signal (value changed)
CcspWi-FiAgent-->>Agent: Success response
Agent->>Cloud: HTTPS 200 OKRDK Unified Components
To address CCSP’s limitations and modernize the RDK Broadband architecture, RDK Unified Components were developed as next-generation middleware designed for better performance, simpler design, and native RBUS support. These components are progressively replacing CCSP components in an ongoing transition, with both architectures coexisting in current deployments. Unified Components provide direct HAL access reducing layers between component and hardware, RBUS optimization delivering faster performance for many operations, asynchronous design with non-blocking I/O preventing stalls, and efficient memory usage through shared libraries instead of separate processes where appropriate.
The architecture emphasizes simplicity through fewer components via consolidation, cleaner APIs using modern C++ interfaces with less boilerplate, better documentation with detailed API docs and examples, and easier debugging with simplified code paths. Modularity is achieved through plugin architecture where features can be added as loadable modules, runtime configuration to enable/disable features without recompilation, clear dependency management, and version compatibility with backward compatibility layers.
Core Components
Core unified components provide foundational services that other unified components depend on.
RDK WAN Manager: Central orchestrator for WAN connectivity managing multiple WAN interfaces (Ethernet, DOCSIS, DSL, GPON, LTE, PPPoE) with multi-WAN support. Implements automatic failover using ping/HTTP/DNS health checks, load balancing across connections, and policy-based routing for application-aware decisions.
RDK VLAN Bridge Manager: Configures VLANs and bridges for service segmentation (IPTV, VoIP, data, guest networks, IoT). Supports 802.1Q tagging, QinQ nested VLANs, dynamic creation, and service-to-VLAN mapping.
Key Components
Key unified components implement specific functional domains.
OneWi-Fi: Replaces CcspWi-FiAgent, CcspHotspot, and vendor Wi-Fi managers with single unified component. Manages all radios and SSIDs from one process, supports Wi-Fi 6/6E features (OFDMA, TWT, BSS coloring, WPA3), implements client steering across 2.4GHz/5GHz/6GHz bands, and provides mesh networking.
RDK GPON Manager: Controls GPON/EPON optical interfaces for fiber broadband. Manages ONU/ONT operations (optical signal monitoring, ranging, registration, power control), OMCI protocol, and service provisioning from OLT.
RDK PPP Manager: Establishes PPPoE/PPPoA connections with PAP/CHAP/MS-CHAP authentication, dynamic IP and DNS configuration, automatic reconnection on failure, and support for VLAN-tagged sessions.
RDK Telco Voice Manager: Manages VoIP services including SIP registration, codec handling (G.711, G.729, G.722), call features (waiting, forwarding, caller ID), RTP/SRTP media with QoS, and FXS/FXO port control.
RDK Cellular Manager-MM: Controls LTE/5G modems for WAN connectivity. Handles modem power and firmware, SIM operations (PIN/PUK, eSIM), network registration (2G/3G/LTE/5G), PDP context activation, and data usage tracking.
Inter-Process Communication (IPC)
RDK Broadband uses two IPC mechanisms: D-Bus, the legacy message bus used by CCSP components, and RBUS, the modern IPC solution designed for RDK Unified Components. RBUS was developed to address performance and complexity issues of D-Bus, and is progressively replacing it as components transition from CCSP to the unified architecture. During this transition, both mechanisms coexist to maintain compatibility.
RBUS uses a three-layer architecture: the RBUS API Layer provides TR-181-aligned APIs for properties, methods, events, and table operations; the RBUS-Core Layer handles RPC, event publish/subscribe, registration, and discovery; and the rtMessage Layer provides lightweight binary protocol over Unix domain sockets or TCP.
The protocol uses direct point-to-point communication with binary protocol, enabling faster operations compared to legacy mechanisms. RBUS provides event-driven communication where value change notifications automatically update subscribers when parameters change, eliminating polling. Wildcard subscriptions support patterns (“Device.Wi-Fi.Radio.*.Enable”) and namespace matching (“Device.Wi-Fi.**”), with event filtering to deliver only events matching specified criteria.
TR-181 Data Model Integration
TR-181 is the Broadband Forum specification defining a standardized, hierarchical data model for broadband devices. RDK Broadband uses TR-181 as the common data model across all management protocols and interfaces, providing vendor interoperability through consistent parameter naming and enabling operational efficiency with common tools across device fleets.
Structure:
- Objects: Containers grouping related parameters (Device.Wi-Fi., Device.Wi-Fi.Radio.{i}.)
- Parameters: Individual data values with types (Device.Wi-Fi.Radio.1.Channel as int, Device.Wi-Fi.Radio.1.Enable as boolean)
- Multi-instance Objects: Tables denoted by {i} with numbered instances (Device.Wi-Fi.SSID.{i}. → Device.Wi-Fi.SSID.1., Device.Wi-Fi.SSID.2.)
- Commands: Executable operations (Device.Wi-Fi.Radio.1.Reset(), Device.Reboot())
Component Ownership in RDK Broadband:
- CcspPandM: Device.DeviceInfo., Device.Time., Device.UserInterface., Device.Users.
- OneWi-Fi/CcspWi-FiAgent: Device.Wi-Fi.*
- CcspEthAgent: Device.Ethernet.*
- RDK WAN Manager: Device.X_RDK_WanManager.*, coordinates WAN interfaces
- RDK VLAN Bridge Manager: Device.X_RDK_Vlan.*
- RDK GPON Manager: Device.X_RDK_PON.*
- RDK Cellular Manager: Device.Cellular.*
TR-181 Request Flow
The following diagram illustrates a typical TR-181 request flow using a Wi-Fi configuration example:
%%{init: { "config": { "useMaxWidth": false } }}%%
sequenceDiagram
participant Cloud as Cloud ACS
participant Agent as Protocol Agent
participant Registry as CcspCr/RBUS
participant Component as Component<br/>(Wi-Fi/WAN/etc)
participant HAL
participant HW as Hardware
participant PSM
Cloud->>Agent: SetParameterValues<br/>Device.Wi-Fi.Radio.1.Channel=11
Agent->>Agent: Validate auth/authz
Agent->>Registry: Lookup component for<br/>Device.Wi-Fi.Radio.1.Channel
Registry-->>Agent: CcspWi-FiAgent/OneWi-Fi
Agent->>Component: IPC request
Component->>Component: Validate value<br/>Check regulatory rules
Component->>HAL: HAL API for platform operation
HAL->>HW: Vendor-specific commands
HW-->>HAL: Success
HAL-->>Component: Return 0
Component->>PSM: Persist value
Component->>Registry: Publish value change event
Component-->>Agent: Success response
Agent->>Cloud: 200 OKFlow Steps:
- Request Initiation: Cloud ACS sends RPC via TR-069 (SOAP/HTTP), TR-369 (USP/MQTT), or WebPA (HTTPS)
- Protocol Agent: Receives request, validates authentication and authorization, extracts parameter path and value
- Namespace Resolution: For CCSP, CcspCr queries component ownership; RBUS has built-in discovery
- IPC Communication: Marshal parameter and value, route to owning component via IPC
- Component Processing: Validate input against state and regulatory rules, prepare HAL call
- HAL Invocation: Execute standardized vendor-neutral API, translate to chipset-specific commands
- Hardware Execution: Driver sends commands to chip, firmware executes changes
- Response: Component receives HAL confirmation, updates state, publishes event, persists via PSM, returns success to agent, agent confirms to cloud
Component Interactions
RDK Broadband components interact using patterns that balance performance, maintainability, and system complexity. Three primary patterns govern component communication.
Request-Response Pattern
sequenceDiagram
participant App as Application
participant MW as Middleware
participant HAL
participant HW as Hardware
App->>MW: Get/Set Parameter
MW->>MW: Validate input<br/>Check state
MW->>HAL: HAL API call
HAL->>HW: Vendor command
HW-->>HAL: Response
HAL-->>MW: Return value
MW-->>App: Success/FailureSynchronous, top-down pattern for simple get/set operations. Requests flow from application through middleware (business logic, validation) to HAL (hardware abstraction) to platform (vendor implementation). Caller blocks waiting for response.
Use Cases: Configuration queries, single parameter updates, status reads that complete in <100ms
Event-Driven Pattern
sequenceDiagram
participant HW as Hardware
participant HAL
participant Pub as Publisher
participant Bus as RBUS
participant Sub1 as Subscriber 1<br/>(Telemetry)
participant Sub2 as Subscriber 2<br/>(WAN Mgr)
participant Sub3 as Subscriber 3<br/>(Analytics)
HW->>HAL: Interrupt/Event
HAL->>Pub: Callback notification
Pub->>Bus: Publish event
Bus->>Sub1: Event delivery
Bus->>Sub2: Event delivery
Bus->>Sub3: Event delivery
Note over Sub1,Sub3: Process independently<br/>and asynchronouslyAsynchronous publish/subscribe pattern where producers publish events and multiple consumers react independently. Hardware events flow from driver through HAL to middleware, which publishes RBUS events received by subscribers (Telemetry, WAN Manager, Analytics).
Use Cases: Wi-Fi client association/disassociation, WAN link up/down events, DHCP lease changes, system alarms, real-time telemetry
Practical Use Case
WAN Interface Failover
sequenceDiagram
participant CM as CcspCMAgent
participant WAN as RDK WAN Manager
participant Cell as RDK Cellular Manager
participant Net as Network<br/>(routing/NAT)
participant Cloud
Note over CM: DOCSIS link down detected
CM->>WAN: RBUS event: DOCSISStatus=Down
WAN->>WAN: Check WAN policy<br/>Cable Pri=1, Cellular Pri=2
WAN->>WAN: Validate cellular backup<br/>SIM valid, signal OK
WAN->>Cell: Activate cellular interface
Note over Cell: Modem power-on: 1-2s<br/>Network registration: 2-5s<br/>PDP context: 1-3s
Cell->>Cell: Configure wwan0 interface
Cell->>WAN: RBUS event: Cellular Up
WAN->>Net: Update default route to wwan0
WAN->>Net: Update NAT/firewall for wwan0
WAN->>Net: Configure DNS to cellular servers
WAN->>WAN: Verify connectivity<br/>ping, DNS, HTTP
WAN->>WAN: Update TR-181 parameters
WAN->>Cloud: Publish failover event
Note over CM,Cloud: Total failover: ~12 seconds
loop Monitor Primary
WAN->>CM: Check DOCSIS status every 10s
end
Note over WAN: When cable recovers,<br/>wait 60s stability,<br/>then failbackWhen a primary DOCSIS connection fails, the RDK Broadband gateway automatically switches to LTE backup. CcspCMAgent detects DOCSIS link down within 2 seconds and publishes RBUS event (Device.X_CISCO_COM_CableModem.DOCSISStatus = “Down”). RDK WAN Manager receives the event, retrieves WAN policy from PSM (Cable Priority 1, Cellular Priority 2 with AUTO failover), and validates cellular backup (SIM validity, signal strength, regulatory status, data plan).
WAN Manager invokes RDK Cellular Manager via RBUS to activate cellular. Cellular Manager powers on modem (1-2s), performs network registration with LTE band scanning (2-5s), and establishes PDP context with carrier gateway (1-3s), totaling 4-10 seconds. After receiving IP configuration (carrier-grade NAT IP, gateway, DNS, MTU), Cellular Manager configures wwan0 interface and publishes “Cellular Up” event.
WAN Manager reconfigures the system: updates routing (default route to wwan0), updates NAT/firewall rules (MASQUERADE for wwan0), and configures DNS forwarder for cellular servers. After connectivity verification (ping, DNS, HTTP), WAN Manager updates TR-181 parameters, persists configuration via PSM, and publishes failover events to cloud for monitoring. Total failover time: ~12 seconds.
WAN Manager monitors primary cable every 10 seconds. On recovery, it verifies 60-second stability before automatic failback to the preferred lower-cost, higher-speed cable connection.